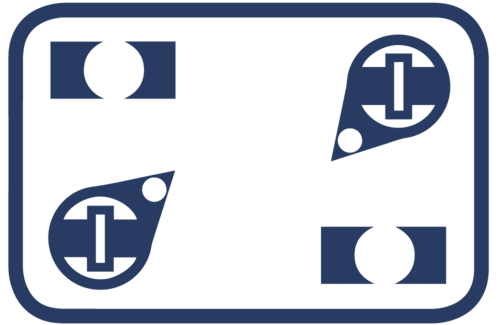
- Drive is usually via the two rear wheels
- Steering movements are carried out via the nose wheel
- Maneuverable due to separate steering axle
- Good load distribution on uneven surfaces
Industries |
Automated guided vehicle systems |
Chassis concepts

Chassis concepts for AGVs - the right solution
Various chassis concepts are used in driverless transport vehicles. These are differentiated according to their movement behavior
Each vehicle basically has three degrees of freedom of movement in its driving plane:
- Translation: movement in longitudinal and transverse direction
- Rotation: Rotation around the vertical axis
In a line-moving vehicle, the alignment of the vehicle frame is fixed by the chassis. This leads to increased space requirements when cornering.
In a surface-mobile vehicle, the orientation of the vehicle frame can be set independently of the vehicle position.
Tricycle drive
Differential drive
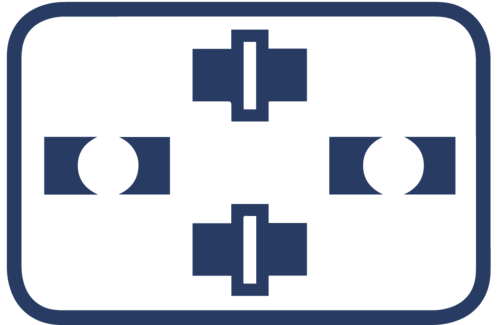
- Drive is via the middle pair of wheels
- Steering movements through different speeds on the two wheels
- Line movements through two drives and two support wheels
- No separate steering drive necessary
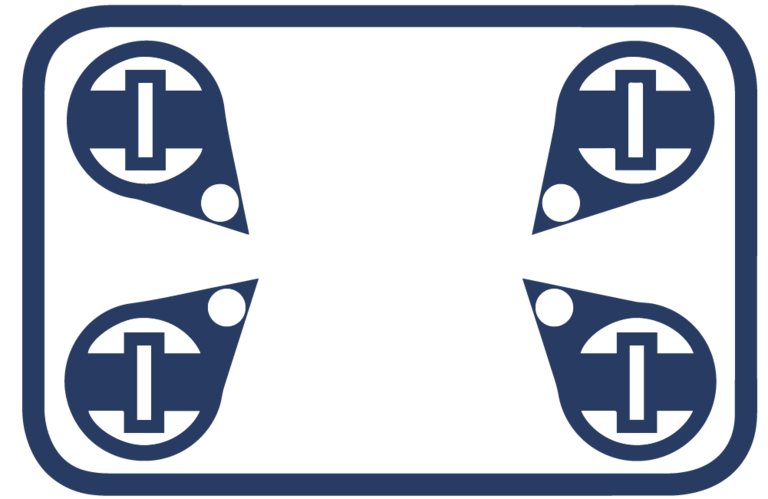
Drive-steer drive with 4 drives
- Drive-steer unit on each of the four wheels
- unrestricted surface mobility possible
- Each drive pair can be used and driven independently of each other
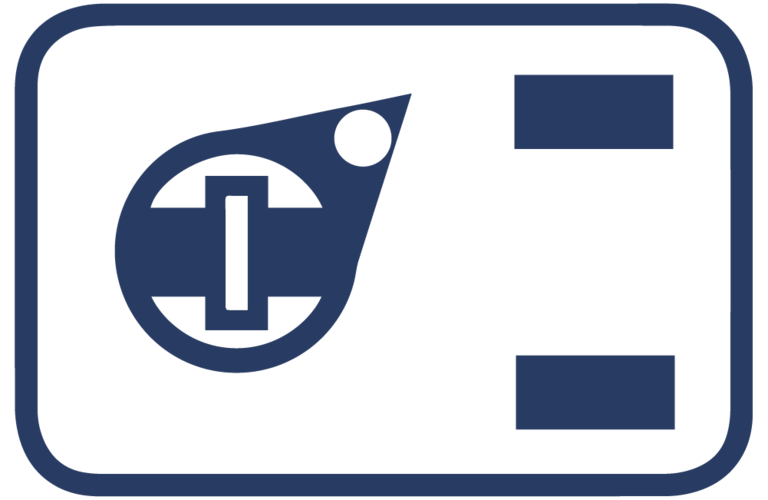
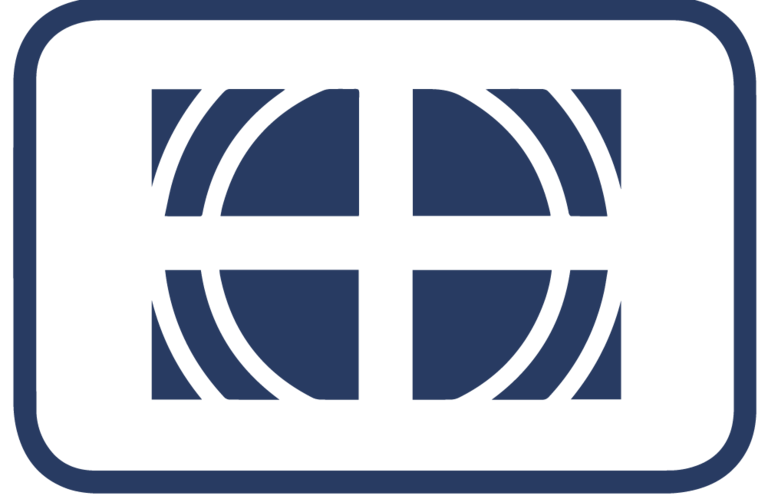
Drive-steer drive with 2 drives
- Load distribution on four wheels
- Two wheels with combined drive/steer system
- Omni-directional travel for almost surface-mobile travel
Mecanum drive
- Mecanum wheels provide area-moving travel through four travel drives without steering drive
- Fixation of the Mecanum wheels ensures area-moving travel due to different speeds of the drive axles
Further information on automated guided vehicles
Industry examples for further SPN drive solutions
Your contact for your industry solution