- Antrieb erfolgt meist über die beiden Hinterräder
- Lenkbewegungen werden über das Bugrad ausgeführt
- Manövierfähig durch separate Lenkachse
- Gute Lastverteilung auf unebenen Flächen
Branchen |
Fahrerlose Transportsysteme |
Fahrwerkskonzepte

Fahrwerkkonzepte für FTS - die passende Lösung
In fahrerlosen Transportfahrzeugen kommen verschiedene Fahrwerkskonzepte zum Einsatz. Diese werden nach ihrem Bewegungsverhalten unterschieden
Jedes Fahrzeug hat grundsätzlich in seiner Fahrebene drei Bewegungsfreiheitsgrade:
- Translation: Bewegung in Längs- und Querrichtung
- Rotation: Drehung um die Hochachse
Bei einem linienbeweglichen Fahrzeug ist die Ausrichtung des Fahrzeugrahmens durch das Fahrwerk fest vorgegeben. Dies führt bei Kurvenfahrten zu einem erhöhten Flächenbedarf.
Bei einem flächenbeweglichen Fahrzeug kann die Orientierung des Fahrzeugrahmens unabhängig von der Fahrzeugposition eingestellt werden.
Dreirad-Antrieb
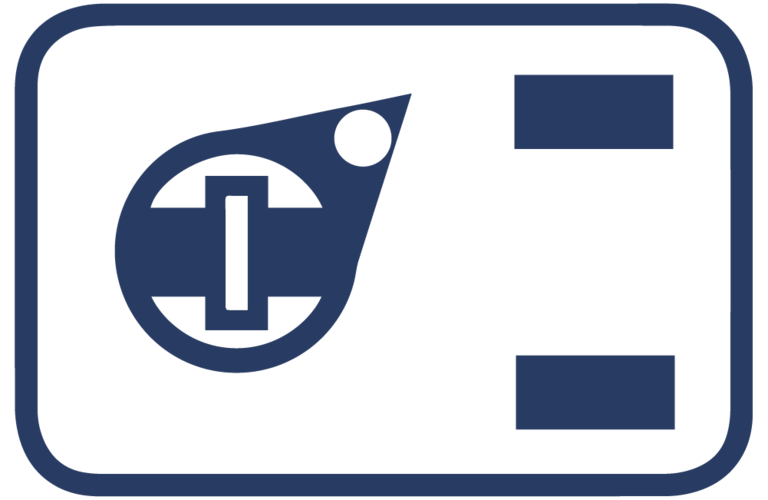
Differenzialantrieb
- Antrieb erfolgt über das mittlere Räderpaar
- Lenkbewegungen durch unterschiedliche Drehzahlen an den beiden Rädern
- Linienbewegungen durch zwei Antriebe und zwei Stützräder
- Kein separater Lenkantrieb nötig
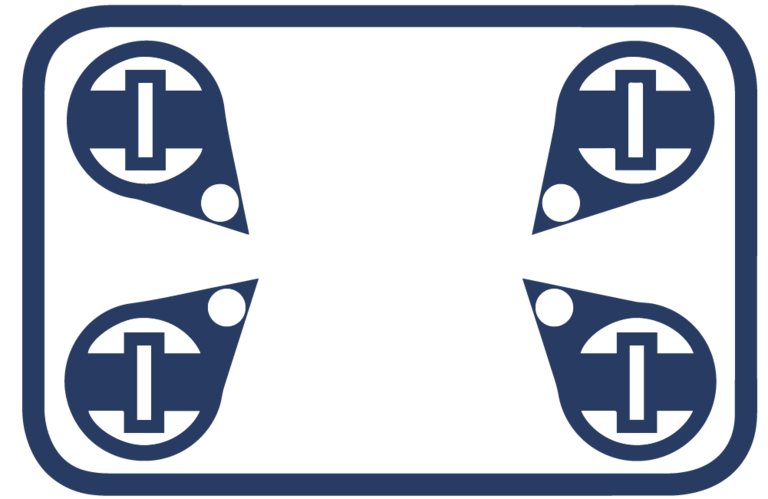
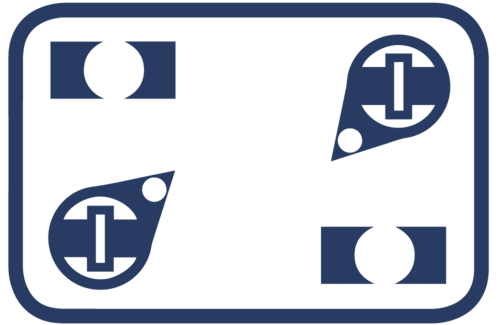
Fahr-Lenk-Antrieb mit 4 Antrieben
- Fahr-Lenk-Einheit an jedem der vier Räder
- uneingeschränkte Flächenbeweglichkeit möglich
- Jedes Antriebspaar kann unabhängig voneinander genutzt und angetrieben werden
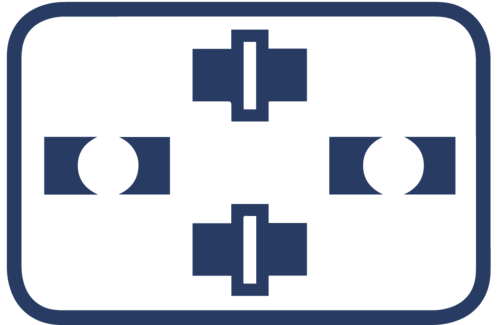
Fahr-Lenk-Antrieb mit 2 Antrieben
- Lastverteilung auf vier Rädern
- Zwei Räder mit kombiniertem Fahr-Lenk-Antrieb
- Omnidirektionale Fahrweise für nahezu flächenbewegliches Fahren
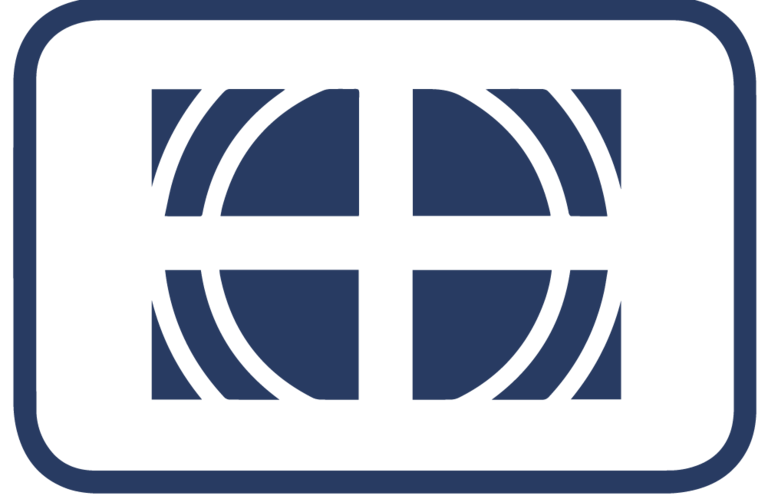
Mecanum-Antrieb
- Mecanum-Räder ermöglichen flächenbewegliches Fahren durch vier Fahrantriebe ohne Lenkantrieb
- Befestigung der Mecanum-Räder sorgt für flächenbewegliche Fahrten durch unterschiedliche Drehzahlen der Antriebsachsen
Weitere Informationen zu Fahrerlosen Transportsystemen
Branchenbeispiele für weitere SPN Antriebslösungen
Ihr Ansprechpartner für Ihre Branchenlösung